


















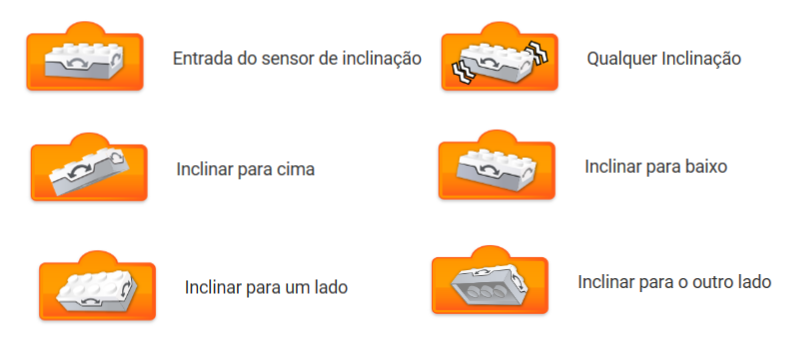











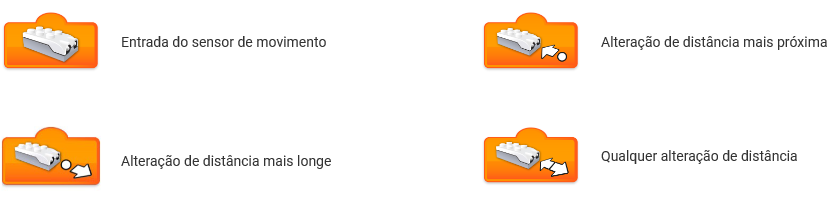
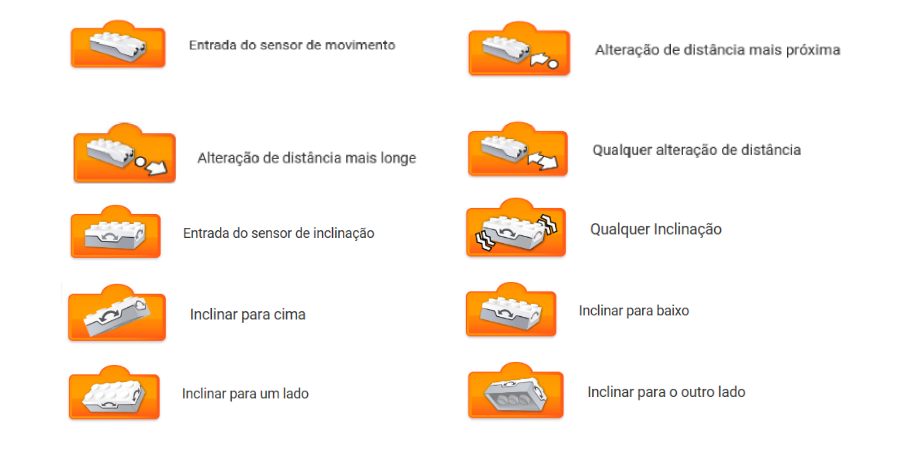
 Este sensor detecta alterações na distância a partir de um objeto dentro do seu alcance de três formas diferentes:
Este sensor detecta alterações na distância a partir de um objeto dentro do seu alcance de três formas diferentes: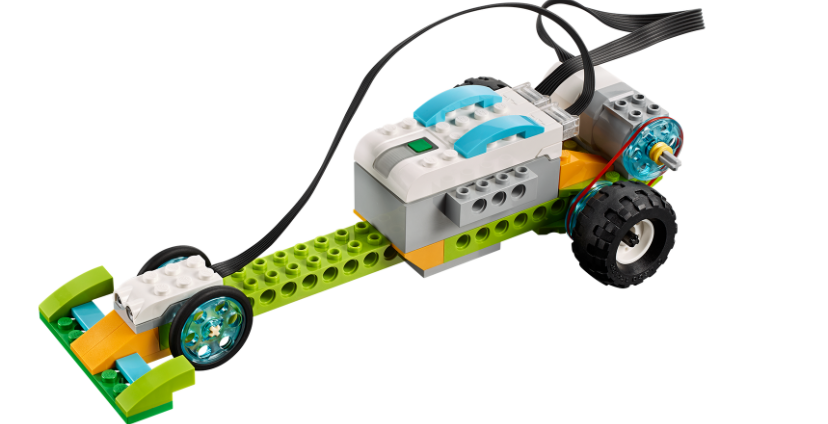








































Por Larissa de Oliveira Figueira Canciglieri | Coordenadora Técnica e Pedagógica
Relatório Formação Corpo Docente | Dezembro 2022
Relato do oitavo encontro | E.E. Miguel Vieira Ferreira
O oitavo encontro de formação de corpo docente ocorreu no dia 19 de dezembro, das 15h30 às 17h, e teve como objetivo principal rever todos os conceitos apresentados nas aulas anteriores, estruturas presentes no Kit Wedo 2.0 e os blocos de programação apresentados durante o curso.
Conceitos do oitavo encontro
- Rever os conceitos de estruturas inteligentes, automação e a lógica de programação apresentada nos encontros anteriores;
- Intensificar os conceitos sobre Sensores e suas possibilidades de programação;
- Construção do pensamento lógico/ computacional utilizando o software WeDo 2.0;
- Falar sobre competições de robótica que ocorrem.
Etapas do oitavo encontro encontro
Etapa 01: Rever os conceitos lógicos abordados em nossos treinamentos até o presente momento.
Etapa 02: Apresentação de competições de robótica: OBR, FLL, RoboCup, entre outros.
Etapa 03: Construção do projeto SHERLOCK DUCK e suas possibilidades de movimento.
Etapa 04: Propor uma competição estilo challenge day com 3 desafios, baseados em todos os conceitos apresentados durante o ano.
Etapa 05: Tira dúvidas e bate papo de encerramento sobre usos da robótica nas aulas regulares e as intersecções entre cultura, artes visuais e tecnologia.
Etapa 01: Revisão
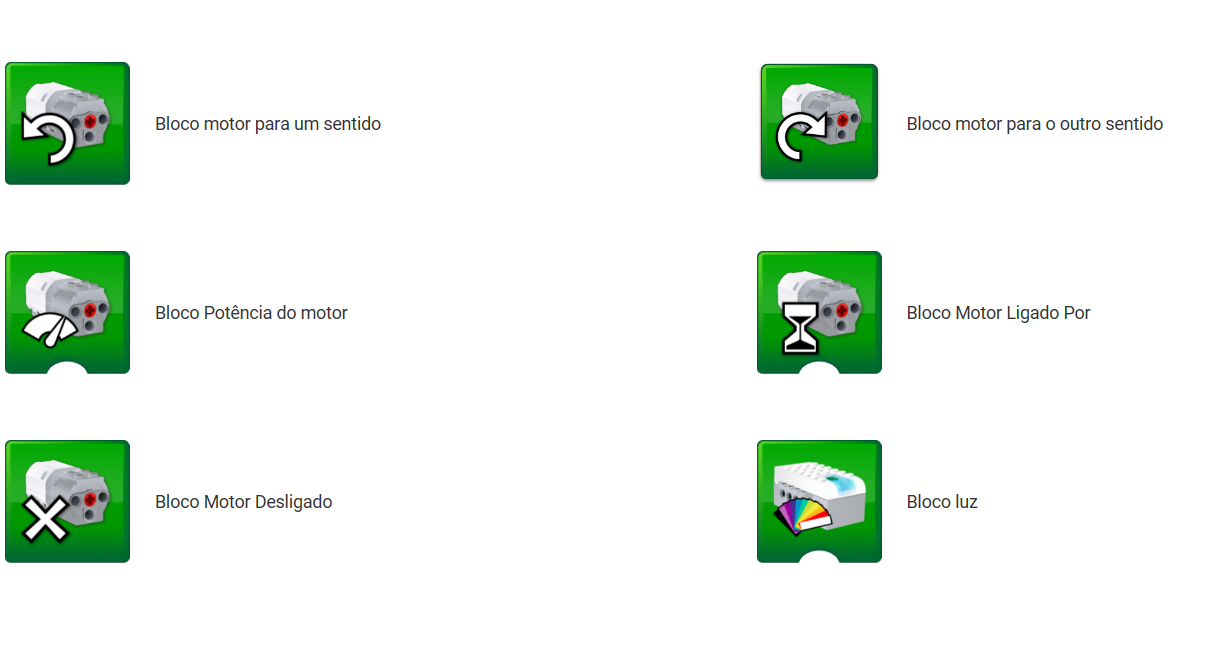
Este primeiro momento tem como objetivo principal rever os conceitos lógicos apresentados ao longo dos encontros. Foram revistos os seguintes blocos:
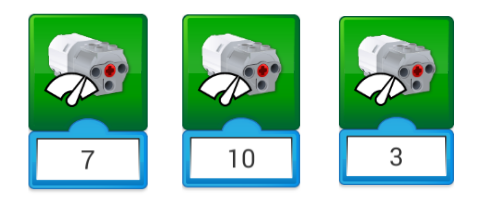
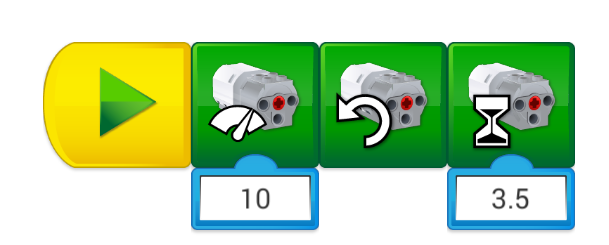
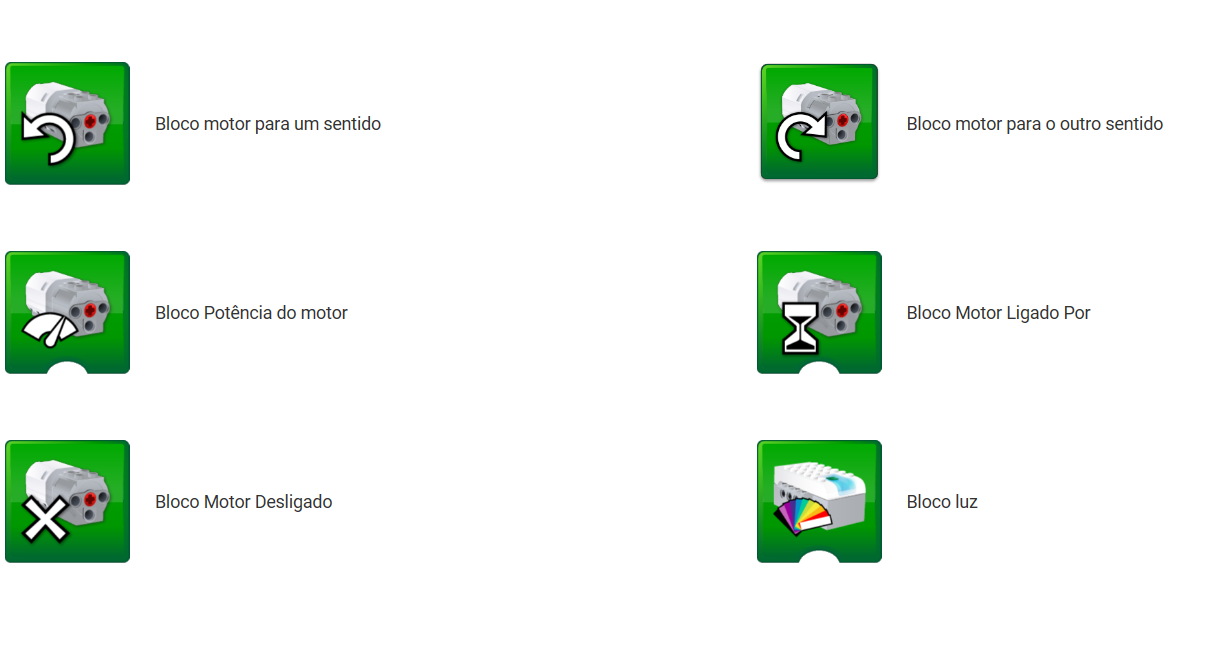
Blocos de Motor
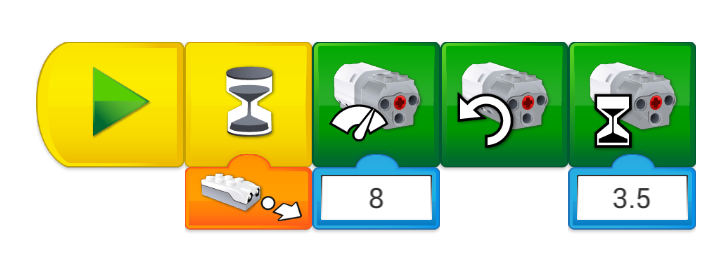
Blocos de Entrada de Sensores
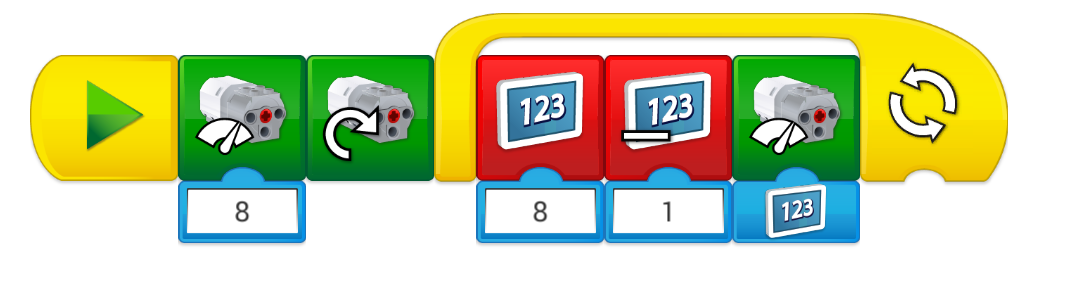
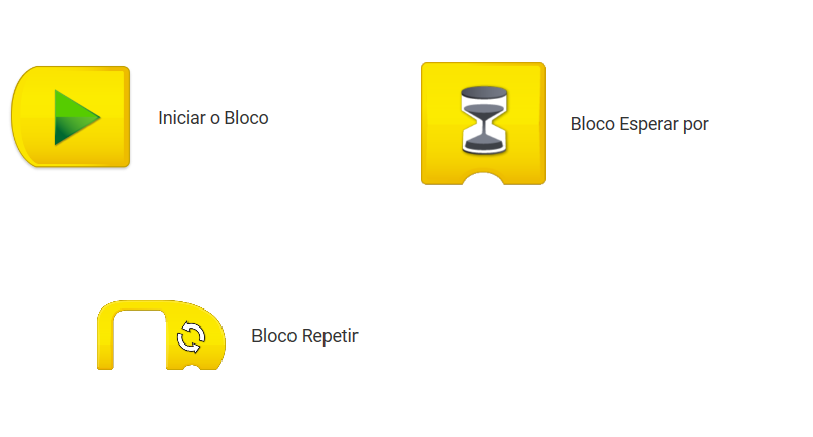
Blocos de Fluxo
Contextualização
Etapa 02: Torneios de Robótica
Uma ótima forma de transformar todo esse conhecimento em prática são os torneios. Equipes infanto-juvenis e universitárias podem participar de diversos tipos de torneios com diferentes características e objetivos, como competições de corrida de obstáculos, futebol de robôs e batalhas de robôs.
Olimpíada Brasileira de Robótica
A OBR permite a participação de alunos do 2º ano do Ensino Fundamental até estudantes do Ensino Médio e Técnico, divididos em três níveis. Há duas modalidades: teórica, onde os participantes mostram seu conhecimento teórico da área, e prática, onde esse conhecimento é aplicado em robôs montados e programados por eles, feitos para percorrer um campo de obstáculos e resgatar “vítimas” ao fim do percurso de forma totalmente autônoma.
Torneio Juvenil de Robótica
O TJR nasceu como um complemento à OBR, buscando também difundir o ensino e aprendizado da área no país, e oferecendo uma competição com estilo bem semelhante. Porém, com o passar dos anos, o torneio foi desenvolvendo um estilo próprio, e acabou por definir suas próprias filosofias para a competição, embora ainda mantivesse o desejo de tornar a área mais conhecida no país.
Ao contrário da OBR, a TJR consiste em 16 modalidades, em que cada uma é um desafio diferente, que precisa de diferentes abordagens. Onze dessas modalidades consistem em desafios já comuns no meio competitivo, como cabo de guerra, sumô, resgate e danças. Os outros cinco, conhecidos como “desafios demo”, são mais desafiadores, necessitando o uso de tecnologias disruptivas, como o uso de drones.
RoboCup Brasil
A RoboCup Brasil é a representante nacional da RoboCup Federation, uma federação de organizações que buscam fomentar a pesquisa e o interesse na área e que realiza diversas competições sob a marca RoboCup.
O objetivo principal dela é conseguir atingir um nível de desenvolvimento tão avançado que permita que robôs consigam competir contra humanos em um jogo de futebol seguindo as regras da FIFA. É algo que está bem longe de nós atualmente, mas que estamos chegando mais perto a cada dia. Por causa disso, a principal modalidade da RoboCup é a de futebol, envolvendo times de robôs de diversos tipos: pequenos, médios e humanoides, mas também apresenta outras modalidades.
Torneio Brasil de Robótica
O TBR apresenta 8 modalidades, divididas por ocupação e faixa etária, permitindo que compitam desde bebês (3 a 5 anos) até jovens adultos (universitários ou não). Buscando difundir a área e permitir que os jovens aprendam mais e cresçam com isso, cada modalidade foi idealizada de forma a acompanhar o desenvolvimento dos participantes e introduzir a área de uma forma mais lenta e completa.
Na TBR, a chamada “modalidade regular” consiste em trabalhos mais teóricos ou lúdicos, buscando incentivar o conhecimento e uso do método científico e familiarizá-los com os conceitos, e é a modalidade aplicada a todas as faixas etárias, mas de formas diferentes. A modalidade Master, para maiores de 19 anos, é a única modalidade prática, e envolve uma corrida com obstáculos.
IRONCup
A IRONCup (Inatel Robotics National Cup) é outra competição que apresenta várias modalidades, embora algumas sejam um tanto diferentes, como trekking e hockey. Porém, o maior foco da IRONCup, e o que torna ela mais conhecida, são suas modalidades de combate e sumô.
A modalidade combate é para os fãs de filme de ação e ficção científica, e consiste exatamente no que o nome indica: luta entre robôs. Dois robôs são colocados no ringue e batalham até que um é “nocauteado”, isto é, não consiga mais se mover. O sumô é similar, mas um pouco menos violento: o objetivo é fazer o robô adversário sair do círculo onde eles começam, como no sumô comum. Essas duas modalidades inclusive se subdividem com base no peso do robô.

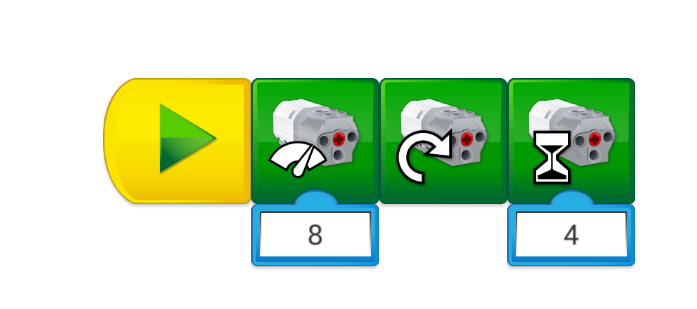
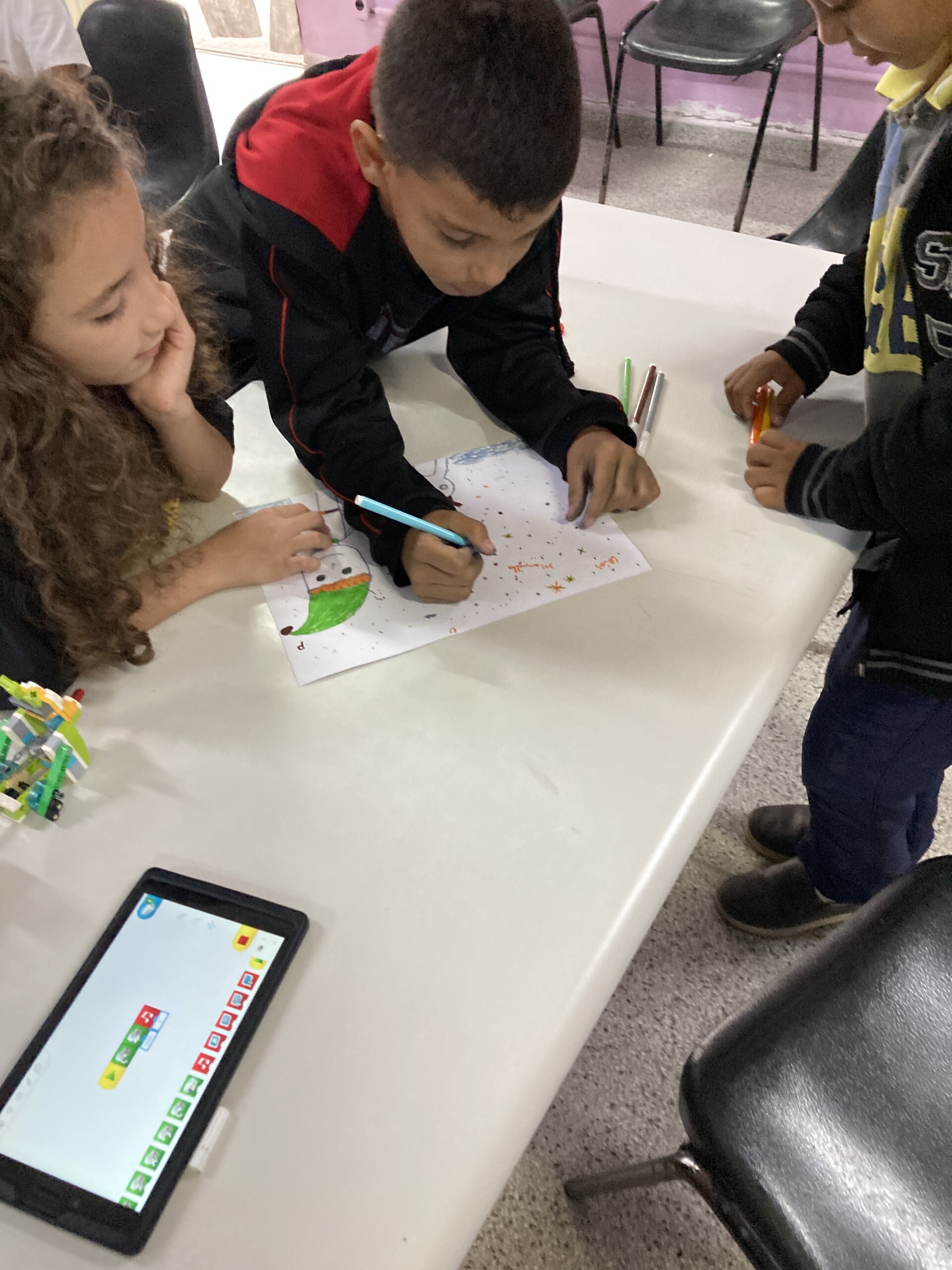
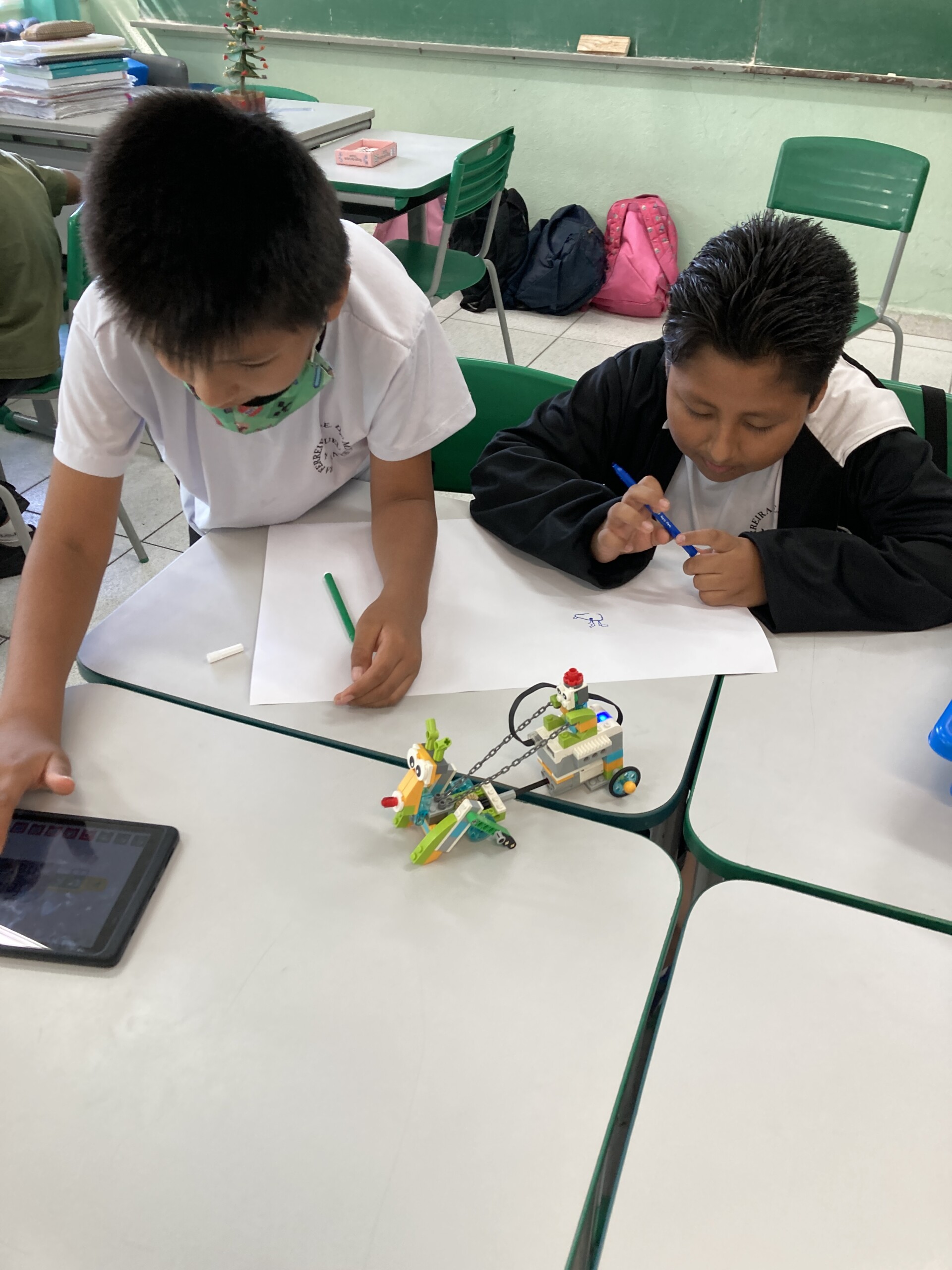
Etapa 03: Construir o protótipo SHERLOCK DUCK
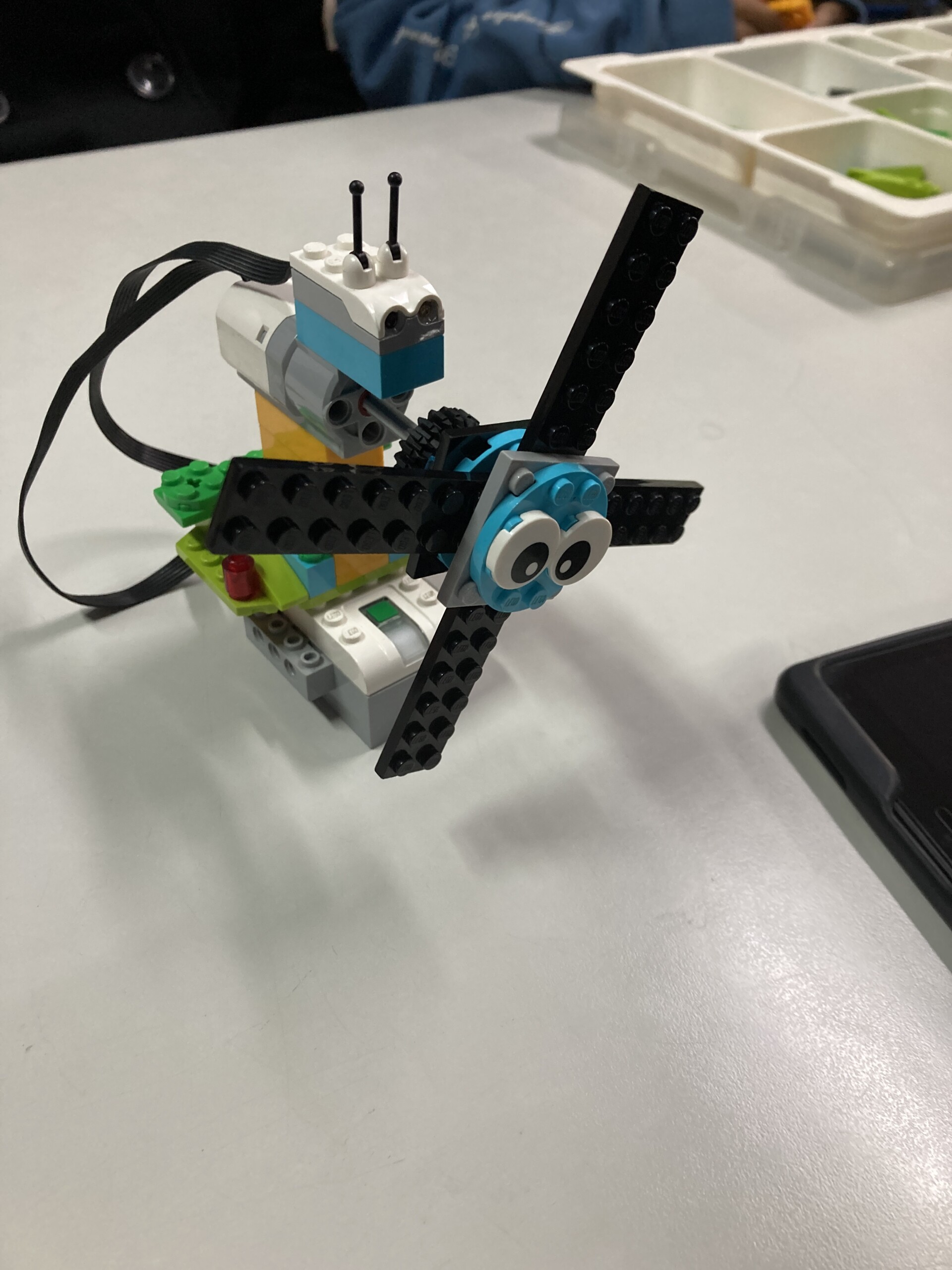
Logo após a apresentação dos conceitos os professores foram convidados a construir o protótipo Sherlock Duck. Inspirado no personagem da literatura britânica, Sherlock Holmes, foi criado o robô Sherlock Duck, um robô apaixonado por desafios, pesquisas, ciência e tecnologia.
Possui como diferencial:
- Um motor conectado a eixos;
- Vários conjuntos de engrenagens que possibilitam que ele se movimente para frente e realize pequenas curvas;
- A presença do motor médio e as possibilidades de rotação por segundo no sentido horário e antihorário;
- Transmissão de movimento.
Esses conceitos foram trabalhados durante a etapa de construção. Neste momento também foram contemplados o desenvolvimento de algumas habilidades socioemocionais como trabalho em equipe , liderança, empatia , cooperação e desenvolvimento de projetos.
Etapa 04: Propor uma competição estilo challenge day com 3 desafios, baseados em todos os conceitos apresentados durante o ano.
O Campo de Missões do Robomind Challenge foi o da fábrica de chocolates. As equipes serão desafiadas em 3 missões que serão apresentadas.
As Missões serão divulgadas em ordem e terão um prazo para serem cumpridas da seguinte forma:
- Missão Start – 25 minutos para construção do protótipo
- Missão 01 - 15 Minutos: Colheita do Cacau
- Missão 02 - 20 Minutos: Fábrica
- Missão 03 - 25 Minutos: Loja de Chocolates
Importante: Se a nova missão for lançada e alguma equipe não tiver concluído a anterior, poderá optar em continuar tentando até conseguir ou seguir para a nova Missão.
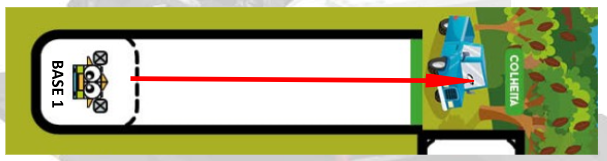
Missão 01 – Colheita do Cacau
Tempo da missão: 15min
Cor do bloco ao concluir a prova: Amarela
Objetivo: O robô deve se deslocar da base 1, indicada pelo juiz, até a área denominada colheita, levando o cesto.
Missão 02 – Fábrica
Tempo da missão: 20 minutos
Cor do bloco ao concluir a prova: Laranja
Objetivo: O robô deve se deslocar da base 2, indicada pelo juiz, até a área denominada fábrica, levando o cacau dentro do cesto.

Missão 04 – Loja de Chocolate
Tempo da missão: 25 min
Cor do bloco ao concluir a prova: Verde
Objetivo: O robô deve se deslocar da base 3, indicada pelo juiz, até a área denominada ChocoMind, levando o chocolate dentro do cesto.

Participação dos grupos
Por questões de calendário e cronograma, o sétimo e oitavo treinamentos foram realizados no mesmo dia. Apesar da junção e do tempo estendido, o grupo conseguiu assimilar todos os conteúdos e realizar todas as missões e desafios.
Para encerrar o último encontro, foi realizado um bate-papo e tira dúvidas sobre possíveis utilizações da robótica nas aulas regulares e as intersecções entre cultura, artes visuais e tecnologia.
Também foram entregues crachás, PINs e outras lembrancinhas para comemorar a finalização do ciclo.



 animais e veículos que têm um foco no mundo real. A abordagem investigativa (mão na massa) encoraja os estudantes a estarem totalmente envolvidos no processo de concepção e construção. Este primeiro momento tem como objetivo principal apresentar o kit e todas essas possibilidades que ele permite ao nosso estudante e professor.
animais e veículos que têm um foco no mundo real. A abordagem investigativa (mão na massa) encoraja os estudantes a estarem totalmente envolvidos no processo de concepção e construção. Este primeiro momento tem como objetivo principal apresentar o kit e todas essas possibilidades que ele permite ao nosso estudante e professor.

 Sensor de Inclinação
Sensor de Inclinação 














