
Relato do quarto encontro | E.E Dr Miguel Vieira Ferreira
O quarto encontro ocorreu no dia 27 de junho no período das 14h30 às 16h e teve como objetivo principal fortalecer os conceitos sobre as estruturas mecânicas e eletrônicas presentes no material, apresentar o sensor de movimento, reforçar os conceitos de blocos de ação, os blocos vermelhos e apresentar os blocos amarelos.
Conceitos do terceiro encontro
- Intensificar os conceitos sobre o engrenagens e associação de engrenagens
- Intensificar os conceitos sobre Smart Hub e motores e tipos de movimento .
- Construção do pensamento lógico/computacional
- Sensor de movimento
Etapas do quarto encontro
Etapa 01: Rever o conceito de associação de Engrenagens – Definição de Engrenagem Motora e Consumidora e tipos de movimento
Etapa 02: Construção do projeto Gira – Gira
Etapa 03: Apresentação do sensor de movimento e seu funcionamento
Etapa 04: Análise do Projeto e seu funcionamento
Etapa 05: Programando – Utilizando Blocos de Ação
Etapa 06: Programando o sensor de movimento
Nossa aula é estruturada em três momentos: Revisão, Contextualização e Síntese. Dessa forma, apresento as estruturas relacionadas às etapas mencionadas acima.
Revisão
Etapa 01: Rever o conceito de engrenagens e seu funcionamento
Foram revistos conceitos importantes apresentados na aula anterior, como:
Engrenagens presentes no kit, seu funcionamento e as possibilidades de movimento fornecidas.
Foram reapresentadas todas as engrenagens presentes no kit, suas diferenças e utilidades.
As engrenagens são elementos que possuem dentes em todo o seu perímetro e, quando acoplados uns aos outros, esses dentes se intercalam fazendo com que um empurre o outro, ou seja, transmitindo movimento.
Dependendo do perímetro dessas engrenagens que compõem o sistema, teremos um movimento de maior ou menor força, maior ou menor velocidade.
De modo geral, as engrenagens podem ser:
- Cilíndricas
- Cônicas
- Rosca sem fim
- Cremalheira
O movimento entre as engrenagens é transmitido de uma unidade motora em que a força é aplicada (ligada ao motor) para uma unidade consumidora onde a força é recebida (associada à motora).
Contextualização
Etapa 02: Construir o protótipo Gira – Gira
Logo após a revisão dos conceitos, os professores foram convidados a construir o protótipo Gira Gira. Ele possibilita que os conceitos de movimento sejam abordados de maneira ampla, já que possui um funcionamento semelhante ao mecanismo do relógio de ponteiro. 
Possui como diferencial:
- Um sistema de engrenagens utilizado para a transmissão de movimento, através da conexão ao motor de uma engrenagem de 20 dentes e de uma engrenagem consumidora de 8 dentes.
- Para gerar o movimento circular, utilizamos uma roda grande para impulsionar o robô.
- São trabalhados conceitos de alteração de potência relacionados ao tempo para que o robô percorra 360º e a definição do conceito de potência (energia por tempo).
Neste momento também foram contemplados o desenvolvimento de algumas habilidades socioemocionais como trabalho em equipe, liderança, empatia, cooperação e desenvolvimento de projetos.
Etapa 03: Apresentação do sensor de movimento e seu funcionamento

Nesta etapa os professores foram induzidos a localizar o sensor de movimento no projeto construído, e assim foram apresentadas suas características e suas possíveis utilidades no funcionamento do projeto.
Sensor de movimento
Este sensor detecta alterações na distância a partir de um objeto dentro do seu alcance de três formas diferentes:
- Objeto se movendo perto;
- Objeto se movendo longe;
- Objeto mudando posição.
Ele se conecta ao Smart Hub , que pode detectar objetos dentro de um alcance de 15 cm. Nenhuma configuração é necessária; basta conectar o sensor de movimento e ele será identificado automaticamente pelo software WeDo 2.0 utilizado na programação.
Etapa 04: Análise do projeto e seu funcionamento
O projeto foi analisado de maneira geral, seus componentes e os principais diferenciais do robô.
- O primeiro tópico trabalhado foram as possibilidades de movimento gerados pelo motor: sentido horário e anti-horário e quais são as possibilidades geradas à engrenagem motora e consumidora devido a essa associação.
- Definição do conceito de potência utilizado para a programação do motor. A potência indica a quantidade de energia elétrica que foi transformada em outro tipo de energia por unidade de tempo.
- Definição do conceito de comprimento de circunferência, rotação e graus.
- Através da variação dos valores de potência do motor (possibilidades de 0 a 10), foram apresentadas as diferenças de tempo para que o Gira-Gira complete 360º. Quanto maior o valor da potência, menor o intervalo de tempo para que seja possível completar uma rotação.
Etapa 05: Programando – Utilizando blocos de ação
Aqui estão alguns termos importantes que foram relembrados:
- Bloco Iniciar
Um bloco iniciar é necessário para executar uma sequência de programação. Executar significa começar uma série de ações até que elas estejam concluídas.
- Bloco de programação
Blocos de programação são utilizados para construir uma sequência de programação. Os blocos com símbolos são usados no lugar de códigos de texto.
- Sequência de programação
Uma sequência de programação é uma sequência de blocos de programação.
Programando o seu Robô
Para o momento de experienciar foram feitos 4 desafios com os professores após a revisão dos conceitos apresentados anteriormente.
Desafios propostos:
Desafio 01: Faça com que o robô Gira-Gira percorra por 4 segundos na potência 3 e meça o comprimento do arco da circunferência
Desafio 02: Faça com que o robô Gira-Gira percorra por 4 segundos na potência 8 e meça o comprimento do arco da circunferência
Desafio 03: Qual conclusão você obteve? O comprimento do arco da circunferência foi maior quando tivemos uma maior energia ao motor ou menor?
Desafio 04: Encontre o tempo necessário para que o robô Gira-Gira percorra 360º utilizando a potência 9.
Síntese
Etapa 06: Programando o sensor de movimento
Foram apresentado aos grupo os blocos:


Foi apresentado o bloco referente à programação do sensor de movimento, visto como a aba das entradas dos sensores.
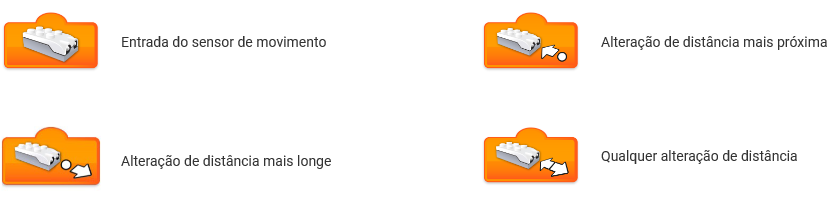
As quatro possibilidades existentes foram apresentadas e discutidas, mas apenas a opção de programação alteração da distância mais próxima foi utilizado nessa atividade.

O bloco "esperar por" foi apresentado juntamente ao bloco anterior, para que os docentes absorvessem a ideia de que ele pode ser utilizado tanto para aguardar um intervalo de tempo quanto para aguardar até que uma atividade se inicie ou encerre.
Dessa forma, foi proposto um quinto desafio para que os professores encerrassem o movimento do robô Gira-Gira quando algo se aproximasse do sensor de movimento.
Desafio 05: Faça com que o Gira-Gira execute o movimento circular no sentido horário, na potência 6, por tempo indeterminado, finalizando o movimento apenas quando algo se aproxima do sensor.

Participação dos grupos
Este quarto treinamento foi satisfatório pois todas as equipes interagiram, construíram e programaram os seus projetos. Os grupos estão evoluindo significativamente em termos de construção, visualização do projeto 3D, identificação das estruturas e do projeto como um todo.
Estão evoluindo em termos da programação, mas de maneira geral apresentam dificuldade na construção da lógica, na sequência correta de passos e em como criar o pensamento computacional antes de iniciar a programação, pontos que serão trabalhados ao decorrer dos próximos encontros.


