Relato do quinto encontro | E.E. Miguel Vieira Ferreira
O quinto encontro de formação de corpo docente ocorreu no dia 19 de setembro, das 14h30 às 16h, e teve como objetivo principal rever os conceitos apresentados no primeiro semestre (estruturas mecânicas e eletrônicas presentes no material), aprofundar os conceitos sobre o sensor de movimento, retomar os conceitos de blocos de ação, os blocos vermelhos e aprofundar os blocos amarelos e sensores.
Conceitos do quinto encontro
- Rever os conceitos de estruturas inteligentes, automação e a lógica de programação apresentada nos encontros anteriores;
- Intensificar os conceitos sobre o sensor de movimento e suas possibilidades de programação;
- Falar sobre a construção do pensamento lógico-computacional utilizando o software WeDo 2.0.
Etapas do quinto encontro
Etapa 01: Rever os conceitos de estruturas inteligentes, automação e a lógica de programação apresentada nos encontros anteriores;
Etapa 02: Construção do projeto Carro de Corrida e sua contextualização utilizando como base o carro Gen 3 (carro de corrida elétrico);
Etapa 03: Análise do projeto e seu funcionamento;
Etapa 04: Programando – Desafios utilizando o sensor de movimento.
Revisão
Etapa 01: Revisão dos conceitos abordados no primeiro semestre em nossos treinamentos.
Foram revistos conceitos importantes, como:
O WeDo 2.0 foi projetado para fornecer oportunidades aos estudantes de esboçar, construir e testar protótipos e representações de objetos, animais e veículos. A abordagem investigativa (mão na massa) encoraja os estudantes a estarem totalmente envolvidos no processo de concepção e construção. Este primeiro momento tem como objetivo principal apresentar o kit e todas as possibilidades que ele permite ao estudante e ao professor.
O que vem na caixa?
O Conjunto Básico do LEGO® Education WeDo 2.0 é composto por 1 Bloco Smart Hub, 1 Motor Médio, 1 Sensor de Inclinação, 1 Sensor de Movimento e uma grande coleção de elementos LEGO cuidadosamente selecionados. Todos os 280 elementos são listados na visão geral fornecida para fácil reconhecimento e facilidade de gerenciamento.
Smarthub
O Smart Hub age como um conector sem fios entre o seu dispositivo e as outras peças eletrônicas, usando a

tecnologia Bluetooth. Ele recebe as sequências de programação do dispositivo e as executa.
O Smart Hub possui recursos importantes:
- Duas portas para conectar sensores ou motores;
- Uma luz;
- Botão de energia.
Motor Médio
Um motor é o que faz outras coisas se moverem.

O Motor Médio usa eletricidade para fazer um eixo girar.
O motor pode ser ligado em ambas as direções; pode ser parado e colocado em diversas velocidades por um período de tempo específico (em segundos).
Sensor de Inclinação

Este sensor detecta alterações em seis posições diferentes:
- Inclinar para um lado;
- Inclinar para outro lado;
- Inclinar para cima;
- Inclinar para baixo;
- Sem inclinação;
- Qualquer inclinação.
Sensor de Movimento
 Este sensor detecta alterações na distância a partir de um objeto dentro do seu alcance de três formas diferentes:
Este sensor detecta alterações na distância a partir de um objeto dentro do seu alcance de três formas diferentes:
- Objeto se movendo perto;
- Objeto se movendo longe;
- Objeto mudando de posição.
Nesta etapa, o foco maior ficou com o funcionamento do sensor de movimento e suas possibilidades.
Contextualização
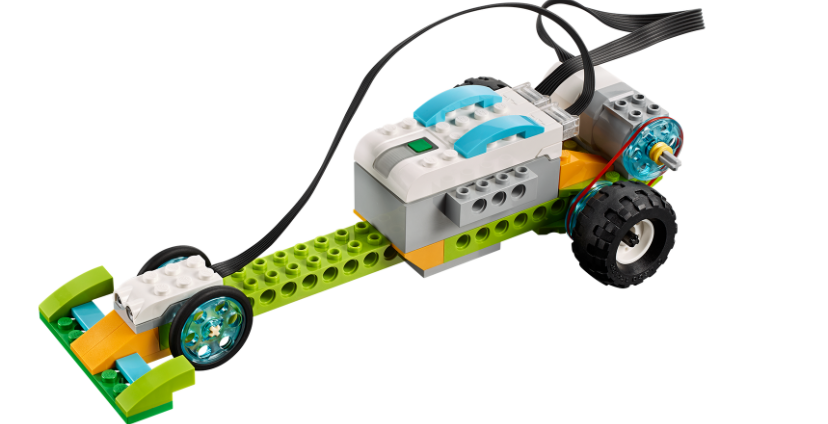
Etapa 02: Construir o protótipo Carro de Corrida
Logo após a revisão dos conceitos, os professores foram convidados a construir o protótipo Carro de Corrida.

Para a contextualização sobre o carro de corrida foi trazido como exemplo o carro de teste Gen3, que promete romper barreiras dentro do automobilismo tanto em termos de tecnologia quanto de sustentabilidade.
Diferenciais
- Velocidade: Uma potência combinada de 600kW (motor de eixo traseiro de 350kW, motor dianteiro padrão de 250kW) será capaz de gerar velocidades superiores a 200 mph (321 km/h).
- Eficiência: Mais de 40% da energia será produzida por frenagem regenerativa, um aumento significativo em relação aos 25% alcançados pelos carros Gen2. As baterias também serão recicladas no final de sua vida útil.
- Peso: Os carros Gen3 são 60 kg mais leves que seus predecessores, em grande parte devido à eliminação dos freios traseiros e ao tamanho menor da bateria. Os monolugares também serão menores para melhor se adequarem às corridas de rua.
- Materiais renováveis: Baterias recicláveis, fibra de carbono reciclada de carros Gen2, borracha natural e fibras recicladas em pneus novos serão incluídas na Gen3 como parte do objetivo da Fórmula E de ser neutra em carbono e por sua tração sustentável.
Etapa 03: Análise do projeto
Esse projeto possui como diferencial:
- Uma polia conectada ao motor para que possa transmitir o movimento a uma segunda polia ligada à primeira por uma correia, fazendo assim com que o nosso carro se movimente.
- São trabalhados conceitos de alteração de construção para aumento e diminuição da velocidade por meio da mudança da ligação da correia a uma meia bucha, fazendo assim com que o período de rotação se altere, bem como a velocidade.
- Nesta etapa, os professores foram induzidos a localizar o Sensor de Movimento no projeto construído, e assim foram revisadas as suas características e possíveis utilidades. Lembrando que ele se conecta ao Smart Hub e pode detectar objetos dentro de um alcance de 15 cm. Nenhuma configuração é necessária: basta conectar o sensor e ele é identificado automaticamente pelo software WeDo 2.0 utilizado na programação.
Neste momento também foram contemplados o desenvolvimento de algumas habilidades socioemocionais, como trabalho em equipe, liderança, empatia, cooperação e desenvolvimento de projetos.
Etapa 04 : Programando – Desafios utilizando o sensor de movimento
Aqui estão alguns termos importantes que foram relembrados:
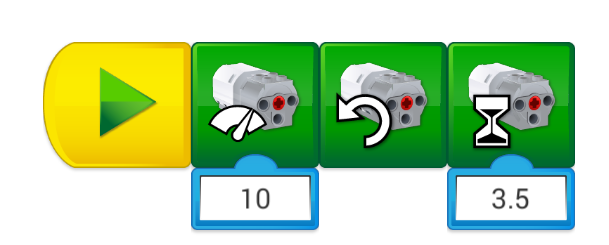
- Bloco Iniciar
Um bloco iniciar é necessário para executar uma sequência de programação. Executar significa começar uma série de ações até que elas estejam concluídas.
- Bloco de programação
Blocos de programação são utilizados para construir uma sequência de programação. Os blocos com símbolos são usados no lugar de códigos de texto.
- Sequência de programação
Uma sequência de programação é uma sequência de blocos de programação.
Foram aprofundados os conceitos sobre o funcionamento de um sensor de movimento/presença/ultrassônico, e como programá-lo utilizando bloco.

As quatro possibilidades existentes foram discutidas, mas apenas as opções de programação foram utilizadas em nossos desafios

O bloco Esperar por foi utilizado juntamente aos blocos anteriores, para que os docentes absorvessem a ideia de que ele pode ser utilizado tanto para aguardar um intervalo de tempo quanto para aguardar até que uma atividade se inicie ou se encerre.
A partir disso, foram propostos cinco desafios aos professores:
Desafio 01: Faça com que o seu Race Car saia do ponto inicial e se locomova até o ponto em que deve estacionar.
Desafio 02: Utilize o sensor para que o Race Car encerre o movimento ao identificar um obstáculo.

Desafio 03: Utilize o sensor para que o Race Car inicie o movimento quando algo se afastar dele (simule uma largada).
Desafio 04: Utilize o sensor para que o Race Car inicie o movimento quando algo se afastar (simule uma largada) e também utilize-o para encerrar o movimento quando se aproximar de um obstáculo.

Síntese
Analisando a associação de polias e correias
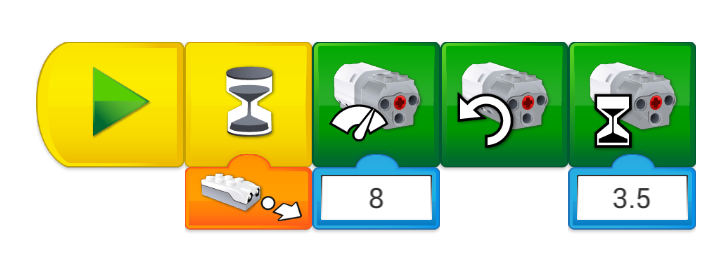
Desafio 05: Dada a programação abaixo, faça com que a velocidade do carro de corrida seja reduzida sem que a programação seja alterada.

Os professores precisam entender o conceito de que será necessária uma alteração estrutural entre as polias e a meia bucha para que o processo de transmissão de movimento possa ser alterado.
Participação dos grupos
Este quinto treinamento foi satisfatório, pois todas as equipes interagiram, construíram e programaram os seus projetos. Os grupos estão evoluindo significativamente em termos de construção, visualização do projeto 3D, identificação das estruturas e do projeto como um todo. Sinto que consegui ultrapassar uma barreira com os professores em relação ao foco e interesse em aprender sobre o assunto e aplicar essa tecnologia em suas aulas, obtendo um rendimento maior a cada treinamento. Os participantes estão evoluindo em termos da programação, mas ainda apresentam certa dificuldade em encontrar a melhor organização de passos para a construção do algoritmo.
